LinuxCNC
Rövid rendszerintegrálási folyamatot követően bármilyen szervo vezérelt gép és környezete irányítható a General Mechatronics mozgásvezérlő rendszerrel. A rendszerünkkel költség-hatékonyan és legegyszerűbben építhető ki egy komplex ipari vezérlés, mivel a széles körben elterjedt és nyílt forráskódú LinuxCNC szoftveren és felhasználói felületen alapszik.
- Rendszerintegrátori útmutató (angol): PCI_UM_eng.pdf
- Brossúra (angol): LinuxCNC_Brochure.pdf
Felhasználói felület - LinuxCNC & PC
A LinuxCNC egy nyílt forráskódú GNU/Linux szoftver rendszer amely NC vezérlést valósít meg PC alapú platformon.
Valós idejű kiterjesztéssel használ Linux kernelt (RTAI or RTLinux), és 9 tengelyig hajt meg gépeket, G-kód (RS-274NGC) alapján.
A gép további egységeit is irányítja, mint például a hűtés, szerszám-hossz mérés vagy szerszámcsere.
Számos grafikus felhasználói felülettel rendelkezik, több féle alkalmazáshoz, mint például érintőkijelzős felhasználás vagy interaktív fejlesztés.
A program utasításkészlete tartalmaz szerszám korrekciókat, eszterga menetelést, szinkronizált mozgást sok tengelyes gép esetén, adaptív előtolást, előtolás túlhajtást, és konstans előtolást.
Egyszerű konfiguráció
A linuxCNC HAL-t ((Hardware Abstraction Layer - Hardver leíró réteg) használ a funkciók és a vezérlés egyes elemeinek összeköttetésére, így nincs szükség programozásra és a szoftver újrafordítására. A HAL segítségével számos bonyolultabb alkalmazás is építhető megőrizve a rugalmasságot. Tetszőleges hardver elemeket köthetünk össze funkciókkal, vezérlőjelekkel, így meghajtva léptető- vagy szervomotorokat, reléket, mágnes-szelepeket, és további aktuátorokat.
A LinuxCNC nem csak derékszögű koordinátás robotok meghajtására használható, egyedi kinematika is implementálható. Számos - már implementált - kinematika közül választhatunk, melyeket csupán paraméterezni kell az adott robot meghajtásához, mint például SCARA, PUMA vagy Stewart platformok.
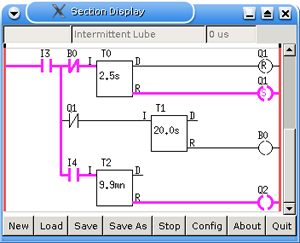
PLC funkciók
A LinuxCNC tartalmaz még egy PLC funkciókat ellátó modult, amelyek bonyolultabb rendszerek kiépítésekor használhatóak jól. A PLC szoftver az ugyancsak nyílt forráskódú Classicladder programon alapszik, és a valósidejű környezetben fut.
A rendszerünk széleskörű PLC megoldásokat kínál a moduláris hardver elemeivel, amelyek RS485 buszra fűzhetők fel.
Rendszer felépítése
A legtöbb rendszer egy beágyazott PC-ből áll, amely a mi PCI kártyánkon és a hozzá tartozó hardver modulokon keresztül kapcsolódik a gép szervóihoz, szenzorjaihoz és aktuátoraihoz. A nyílt forráskódú, PC alapú LinuxCNC könnyedén konfigurálható a különböző rendszerekhez.

Servo interfész - 6 tengely / PCI kártya
Hat tengely számára van csatlakozó a PCI kártya belső élén inkrementális vagy analóg szervók hajtására. Négy féle DIN sine rögzíthető AXIS modul áll rendelkezésre, amelyekből költséghatékonyan hét különböző szervo-konfiguráció állítható össze. Az adott interfész a szükséges modulok helyes összeköttetésével valósítható meg A CAN buszon kommunikáló digitális szervo vezérlők a kártya jobb felső sarkán lévő CAN interfészhez köthetők.
Általános felhasználású I/O - 4 x 8 vonal és 20 vonal optoleválasztott
Négyszer nyolc általános felhasználású I/O vonal található a kártya felső élén, szabványos szalagkábel csatlakozókon. Ezek a vonalak konfigurálhatóak a LinuxCNC-ben bármilyen tetszőleges felhasználásra. Húsz további optoleválasztott bemenet található egy 2x13 pólusú szalagkábel csatlakozón, ide direktbe köthetők a tengelyenkénti három végállás és homing szenzorok, illetve két E-stop bemenet.
PLC funkciók - RS485 buszon keresztül
A PCI kártya I/O és funkció bővítésére különböző féle DIN sínre rögzíthető optoleválasztott modulok köthetőek sorba RS485 buszra. Összesen maximum 16 modul köthető a buszra.
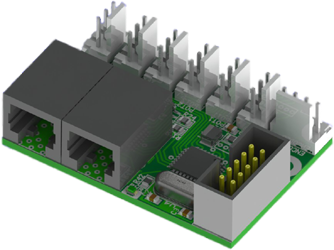
Szervo-modulok csatlakoztatása
Kis méretű DIN sínre rögzíthető modulok biztosítják a különböző féle szervo-modulok egyszerű csatlakozását. Számos különböző rendszer állítható össze: analóg szervo modulok, amelyeknek feszültség referencia bemenetük van, inkrementális rendszerek, amelyeknek Lépés/Irány (Step/Dir), Előre/Hátra (CW/CCW), vagy qvadráns (A/B) bemente van. Illetve CAN buszon kommunikáló szervók, amelyekhez akár használhatunk egy hagyományos enkóderjel visszacsatolást is.
Analóg rendszer, enkóder visszacsatolással:

Inkrementális rendszer, enkóder visszacsatolással és differenciális kimenettel:

Inkrementális rendszer, enkóder visszacsatolással és TTL kimenettel:

Inkrementális rendszer, differenciális kimenettel:

Inkrementális rendszer, TTL kimenettel:

Abszolút, digitális (CAN-busz alapú) rendszer:

Abszolút, digitális (CAN-busz alapú) rendszer, hagyományos enkóder visszacsatolással:

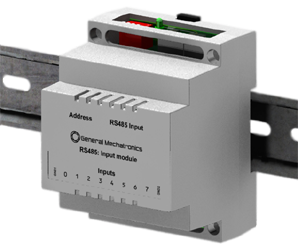
PRS485 bővítő modulok
Ezek a modulok a PCI kártya I/O és funkció RS485-buszon keresztüli bővítésére készültek.
8-csatornás kimeneti relé modul
A kimeneti relé modul nyolc NO-NC relét biztosít egy-egy hárompólusú sorkapocsra kötve relénként.

8-csatornás bemeneti modul
Nyolc optoleválasztott bemenetet biztosít.
8-csatornás ADC és 4-csatornás DAC modul
A DAC és ADC modul tartalmaz egy optoleválasztott 4 csatornás digitál-analóg konvertert, és egy optoleválasztott nyolc csatornás analóg-digitál konvertert.

Tanítópult modul
A tanítópult modulon nyolc nyomógomb bemenet, egy 6 csatornás ADC, joystick vagy potenciométerek számára, és egy qvadráns enkóder bemenet található.
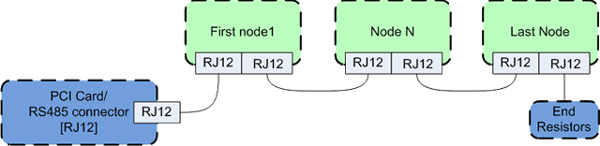
A modulok csatlakozatása
A modulok soros topológiába köthetők a buszra, lezáró ellenállásokkal a busz végén. A busz első eleme a PCI kártya, az utolsó pedig a busz legvégén lévő modul.
Automatikus modul felismerés
Minden a buszra kötött modult automatikusan észlel a PCI kártya. Indítás közben a LinuxCNC driver automatikusan betölti az elérhető modulok által nyújtott pin-eket és paramétereket.
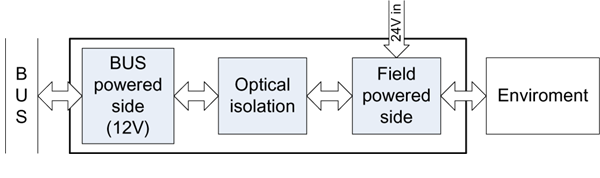
A modulok tápellátása
Minden modul optikailag leválasztott a buszról, így van egy busz által táplált része, és egy külső, a vezérelt környezettől kapott tápja. Kivéve a tanítópult modul, amelyre rend szerint csak kezelőeszközök köthetők.